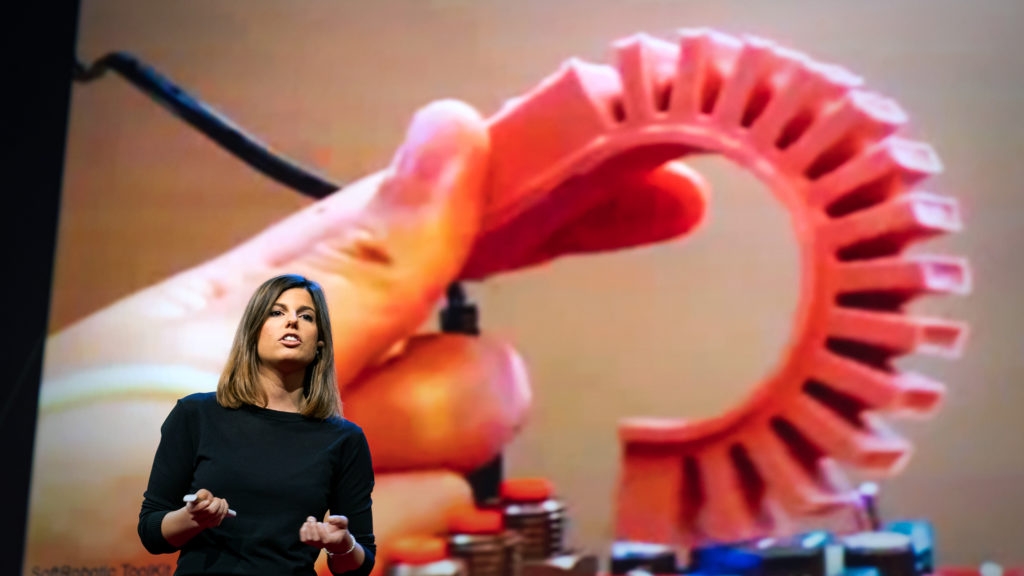
Джада Гербони: Мягкие роботы — невероятный потенциал
Роботы спроектированы для скорости и точности. Но их жесткость часто ограничивает их использование. Инженер-биомедик Джада Гербони проливает свет на последние достижения в области «мягкой робототехники», новой области, цель которой – создание пластичных машин, имитирующих природу, например, робота-осьминога. Узнайте больше о том, какую важную роль в хирургии, медицине и нашей повседневной жизни могут играть «мягкие роботы»
Итак… Роботы. Роботы призваны выполнять одинаковые задачи миллионы раз с минимальным числом ошибок. Что очень сложно для людей, верно? Очень занятно смотреть, как они работают. Посмотрите на них! Я могу смотреть на них часами. Нет? Но положение может измениться, если перенести робота за стены фабрики, где окружающая обстановка не упорядочена и не организована идеально, чтобы выполнить даже элементарную задачу, не требующую сверхточности… И вот что происходит. Например, для открытия двери не нужна большая точность.
Или небольшая ошибка в измерениях — и он промахнулся мимо вентиля… Часто без шансов на восстановление.
Так в чем причина? В течение многих лет роботы совершенствовались в скорости и точности, что отражалось в особенностях их конструкции. Возьмем роботизированную руку — это определенная структура взаимосвязанных частей и моторов-приводов, которые перемещаются друг относительно друга. Для такой структуры требуется четко организованное пространство, просчитанная среда. Важно предусмотреть и запрограммировать каждое движение частей робота, потому что даже маленькая погрешность может спровоцировать сбой. Можно что-то повредить или вывести робота из строя, если случается что-то серьезное.
Давайте поразмышляем об этом. Только не думайте о мозге этих роботов или о том, достаточно ли хорошо мы их программируем. Давайте посмотрим на их корпус. Что-то явно с ними не так… Потому что то, что делает робота точным и сильным, также делает его ужасно неэффективным в реальном мире, так как он не обладает пластичностью, не может подстраиваться для взаимодействия с окружающей средой. Что, если подойти с другой стороны, стать мягче, чем окружающие объекты? Может показаться, что невозможно что-либо делать, если ты слишком мягкий. Возможно. Однако природа демонстрирует обратное. Например, на дне океана, под многотонным гнетом гидростатического давления, обитает суперпластичное существо, которое легко передвигается и взаимодействует с объектами намного тверже себя. Вот оно перетаскивает кокосовые скорлупки благодаря пластичности своих щупалец, которые служат ему ногами и руками. Очевидно, осьминог может даже открыть банку. Впечатляюще, не так ли?
И это явно не только благодаря возможностям его мозга, но и благодаря особенностям его тела. Это яркий пример, я бы сказала, ярчайший пример телесного интеллекта, вида интеллекта живых организмов. У всех у нас он есть. Наше тело, его формы, состав и структура играет основополагающую роль в физической активности. Мы можем приспосабливаться к среде, что эффективно в большом диапазоне условий без предварительного планирования и сложных вычислений.
Так почему бы нам не задействовать этот телесный интеллект в наших роботах, чтобы освободить их от избыточных операций по вычислению и оценке? Чтобы это сделать, можно использовать стратегию природы, которая в процессе эволюции неплохо поработала над дизайном существ для эксплуатации в естественной среде. И легко заметить, что природа часто использует мягкие материалы, а твердые материалы — избирательно. Этот процесс сейчас происходит в новом направлении робототехники, которое называют «мягкие роботы». Его основная цель — не делать сверхточные машины, потому что у нас уже есть такие, а сделать роботов, способных работать в условиях естественной неопределенности, способных выйти в реальный мир. Мягкость роботу придают композитные материалы, которые делают из материалов и структур, способных подвергаться большой деформации. Больше никаких жестких соединений. Для осуществления движений используется распределенный привод, так как мы постоянно должны контролировать форму этого пластичного корпуса, что требует наличия большого количества связок и суставов. Но при этом отсутствует какая-либо жесткая структура.
Представьте себе, насколько отличается процесс сборки мягкого робота от обычного, в котором есть соединения, шестеренки и винты, соединяющиеся строго определенным образом. В мягких роботах вы сразу делаете привод в большинстве случаев и формируете пластичный материал в форму, которая соответствует конкретной задаче. Например, здесь вы просто деформируете структуру, придавая ей сложную форму.Попробуйте сделать то же самое с обычными твердыми соединениями. Здесь же вы используете только одну вводную, например, давление воздуха.
Давайте рассмотрим различные примеры мягких роботов. Этот малыш разработан в Гарварде. Он работает благодаря волнам давления в его корпусе, благодаря своей пластичности он смог проскользнуть под низкой перегородкой, и продолжить движение. Но далее он продолжает движение немного по-другому. И это очень сырой прототип. Они также сделали версию робота с бортовым электропитанием. Он может функционировать в условиях сложного реального мира, например, попасть под автомобиль… и продолжать двигаться.
Он классный.
Или рыба-робот, которая плавает, как настоящая рыба в воде, благодаря мягкому хвосту, содержащему привод, используя давление воздуха. Этот робот из МIT. И, разумеется, робот-осьминог. Кстати, это был один из первых проектов, разработанных в мягкой робототехнике. Вы видите искусственное щупальце, но они также сделали целого робота с несколькими щупальцами. Его можно просто бросить в воду, и он сможет плавать, исследуя морское дно, но не так, как это делают жесткие роботы. Что очень важно для чувствительной среды, такой как коралловые рифы.
Давайте вернемся на сушу. Здесь вы видите «растущего» робота, разработанного моими коллегами из Стэнфорда. Вид с камеры, закрепленной сверху. И этот робот особенный, потому что он растет, используя давление газа, в то время как остальная его часть твердо закреплена в среде. Здесь вдохновителями были не животные, а растения, которые врастают в поверхность аналогичным образом и сталкиваются с большим разнообразием различных ситуаций.
Но я инженер-биомедик, и, пожалуй, мое самое любимое применение роботов — в медицинской сфере. Представьте тесное взаимодействие с человеческим телом или даже внутри него, например, для выполнения наименее травмирующей процедуры. Такие роботы могут очень пригодиться хирургам, ведь им приходится проникать в тело, используя малые отверстия и твердые негибкие инструменты. И эти инструменты должны взаимодействовать с очень тонкими структурами в очень нестандартной среде и действовать безопасно. А ввод камеры внутрь тела для дополнительного визуального контроля — очень сложная манипуляция, если использовать что-то негнущееся, например классический эндоскоп.
С моей предыдущей группой исследователей из Европы мы разработали хирургическую камеру, которая очень отличается от обычного эндоскопа тем, что она может передвигаться с помощью пластичных модулей, которые могут сгибаться и удлиняться в любом направлении. Она использовалась хирургами для контроля манипуляций с различными инструментами с разных точек обзора без страха задеть что-то лишнее. Здесь вы видите мягкого робота в действии, вот он проникает внутрь. Это модель тела, не настоящее тело. Он осматривается вокруг. Есть лампочка, потому что обычно в теле не бывает большого количества источников света.
Иногда хирургическая операция может быть проведена лишь одной иглой. И сейчас в Стэнфорде мы работаем над очень пластичной хирургической иглой, чем-то вроде маленького мягкого робота, который спроектирован для взаимодействия с тканями и действует внутри целостного органа. Это позволяет иметь доступ к различным целям, типа опухоли, расположенной внутри органа, используя небольшой прокол для введения. И мы можем даже обходить структуры, которые нельзя задевать, на пути к цели.
Это действительно уникальное время для робототехники! Необходимость работы с мягкими структурами ставит сложные задачи перед разработчиками роботов. И мы только учимся, как контролировать и располагать сенсоры на этих пластичных структурах. Разумеется, мы еще даже не приблизились к тому, что природа сумела достичь за миллионы лет эволюции.
Но в одном я точно уверена: роботы будут мягче и безопаснее, и они будут окружать нас, помогая людям.
Перевод: Милена Валдес Дариас
Редактор: Алена Черных
 TED
TED MIT Technology Review
MIT Technology Review Singularity HUB
Singularity HUB Wired
Wired New Yorker
New Yorker Fast Company
Fast Company
 The Atlantic
The Atlantic
 The Guardian
The Guardian
 Raptitude.com
Raptitude.com